【检测原理】
检测系统由工业相机、工业镜头、图像采集卡、工业光源、起偏震片、PC机以及机械结构和机械传动等构成。通过检测精度、检测速度、视野范围、工作距离、工件尺寸来选取合适的工业相机和工业镜头。通过数据传输的大小进行图像采集,本文采用漫反射条形组合光源。
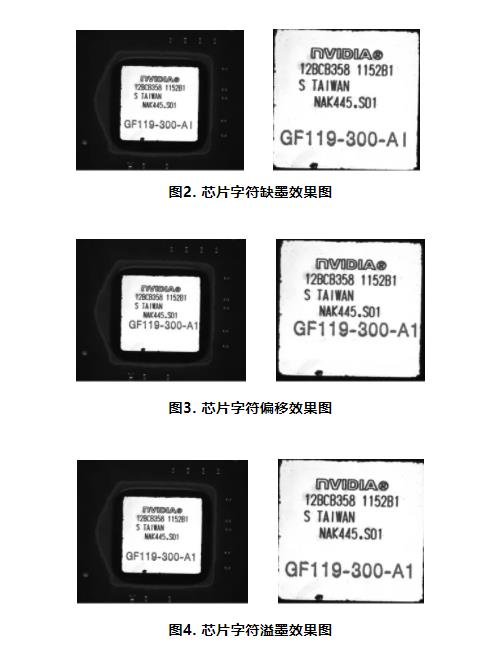
【瑕疵类型】
自动化视觉识别检测芯片上的字符瑕疵,包括:字符偏移、缺失、溢墨。
【检测难点】
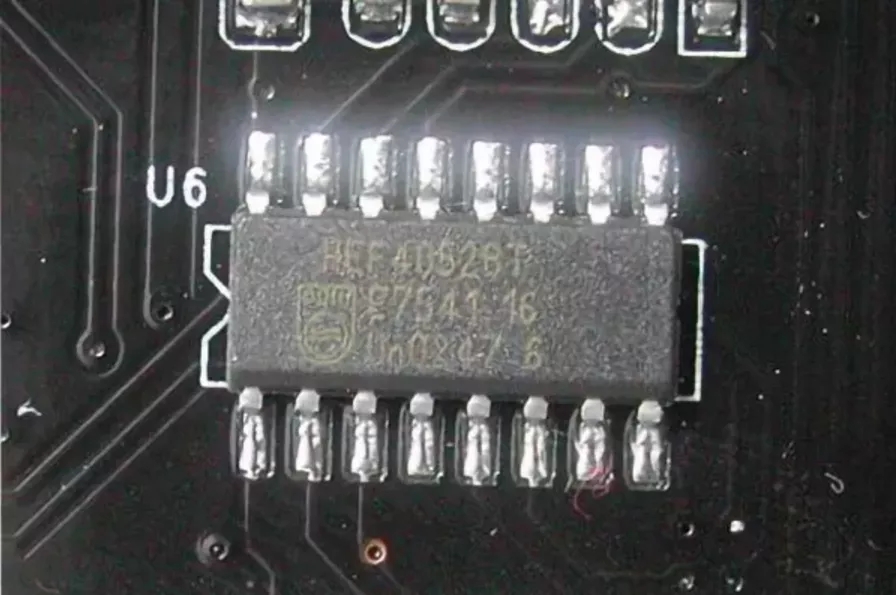
① 芯片表面有油污等杂质怎么检测,普通光线无法穿透油污,无法照亮芯片上的字符。
② 芯片上的字符较小,约1mm*1mm,因此需要高分辨率远心镜头来成像观测。
③ 芯片识别需满足自动化高效检测,拍照频率为0.3s/pcs,因此需要千兆网工业相机。
【数据记录】
保存每班次生产记录到数据库,可供查询、打印
【检测步骤】
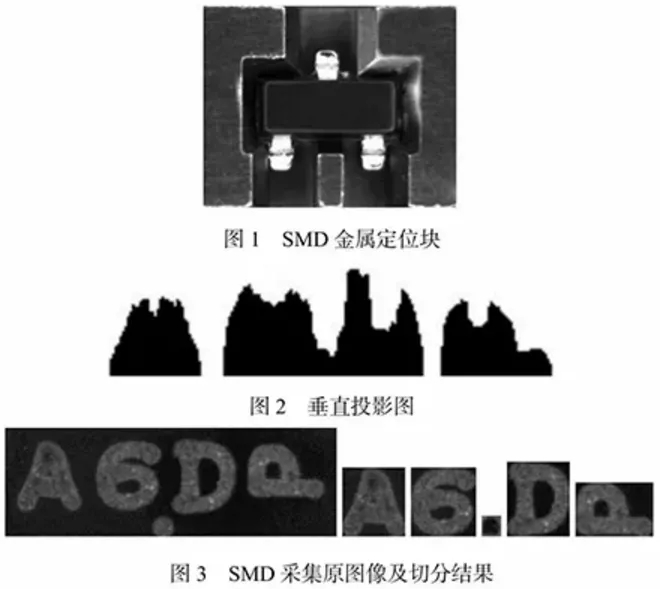
1、字符定位
字符定位通过设计金属定位块的方式,利用金属材料在光源辐照下的辐射特性与SMD的差异性提高对比度来进行快速定位。
2、字符分割
在进行字符分割之前,要进行SMD芯片的位姿矫正。SMD的欧式运动是先旋转、后平移的组合,所以可以用刚体运动来表示位姿。利用二值化图像的像素分布直方图进行分析,从而找出相邻字符的分界点进行分割。在利用垂直投影切分的方式进行字符切割的结果,如下图所示。
3、字符缺陷识别
字符缺陷识别采用基于边缘特征的模板匹配。模板匹配的基本思想是让模板在目标图像中做平移运动,将模板左上角和待检测的图像左上角重合,每移动一个像素,计算模板与待匹配图像的相似度,遍历结束之后,将符合阈值的位置认定为最佳匹配位置。
基于灰度的互相关模板匹配是通过用模板图像遍历待匹配图像,每移动一个像素,计算对应部分的互相关值,将互相关值的最大值作为最佳匹配位置。基于灰度的互相关模板匹配缺点是在光场不均匀情况下,不具有鲁棒性。归一化互相关系数法是一个亮度、对比度线性不变量,能够明显改善光照的线性变化带来的影响。
但是随着图像分辨率的提高,图像匹配的时间会增加,匹配准确度也存在差异,甚至会发生匹配失效的情况,并且由于半导体芯片的位姿和完整性等存在差异,会引起光照的非线性变化,这会导致图像的灰度差异大,进而导致模板匹配结果不准确。较于基于灰度的互相关模板匹配,基于边缘的模板匹配不需要建立两幅图像之间点的对应关系,具有较好的鲁棒性。模板由目标图像边缘的一系列点组成,如下图。
案例结果展示: