挂轨机器人是我司的一款可以在恶劣和特殊环境下执行特巡和定制性巡检任务的机器人。可实现自主定位与导航,搭载特定摄像机,如全景相机或双光云台相机及多种环境监测模块传感器,可实时拍摄及感应周边环境,实现远程在线监测及数据分析。能够替代人工完成例行巡查、故障诊断、预警报警灯任务。帮助企业有效提升运维的内容和频率,突破传统人工巡检的限制,实现运维智能化。可实现对隧道、仓库、厂房、管廊等场景下的全时段智慧安防巡检。
下图为挂轨巡检机器人平台的本体设计示意图,其性能指标如表格 1 所示。
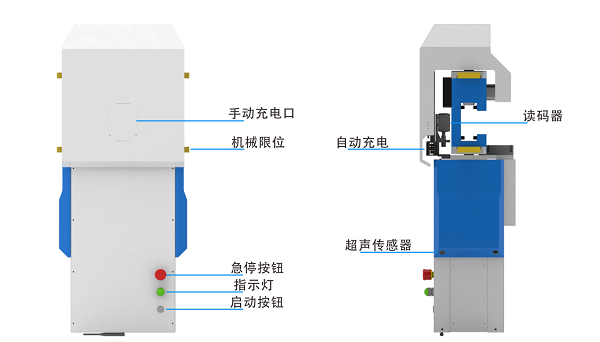

1、挂轨机器人功能介绍
该巡逻机器人更多地可以作为移动采集终端,核心功能仍然需要依靠前端或后台算法,目前我司可在巡逻机器上集成以下功能:
1) 指示灯识别
指示灯识别,支持通过与基准图像对比,通过图像识别算法,进行指示灯运行状态判断,并对异常状态的信号上传报警信息到客户端。其中指示灯可以为控制箱指示灯等。
2) 表计读数识别
表计读取,支持通过摄像头采集的仪表盘图像,根据图像匹配算法进行识别和标注,并将指针角度或数值图像转换为数值,上传到后台客户端。其中表计可以为电流表、电压表、功率表、压力计、流量计、开关分合状态等。

3) 漏液识别
漏液识别,支持通过提取摄像头实时视频的图像,输出到目标检测神经网络,并输出检测结果,判断是否存在漏液区域,并对漏液区域进行抓拍,上传报警信息到后台客户端。
4) 火焰/高温检测
巡逻机器人携带有红外摄像头,能够实现在视野范围内的高温报警,能够及时发现火灾隐患并进行本体端及后台报警,及时应对异常高温和火灾。

上图高温检测抓拍图像
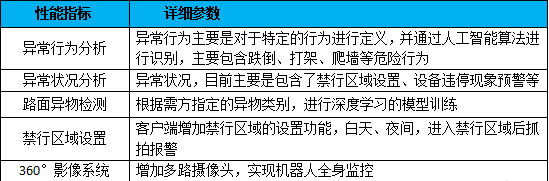
为了满足客户的多样化需求,也可以根据需要增配如表格 2所示的拓展功能,其他需求也可以商讨并定制化开发;
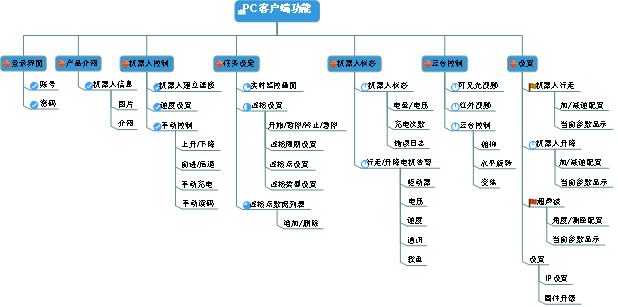
2、挂轨客户端监控系统
位于指挥中心的的挂轨机器人客户端软件如图 6,具备巡检数据显示、参数设置、机器人控制等功能,可以根据客户需求选择不同尺寸的屏幕便于使用。客户端软件的功能如下图所示。